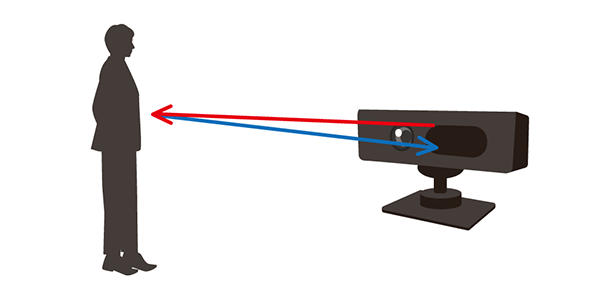
Rgb 深度 カメラ と は. カメラが接続されていれば、realsense viewerのウィンドウ左側にカメラの状態が表示されます。 「stereo module」をonにすると、深度情報を映像として出力します。 カメラの近くにあるものは青色、遠くにあるものは赤色で表現されています。 「rgb camera」をonにすると、通常のカメラ映像を確認できます。 「stereo module」と同時に確認することもできます。 画面右. そこでdepthカメラ界ではおなじみのintel realsenseの2019年最新版、「intel realsense depth camera d435i」をゲットしましたので早速動かしてみました。 depthカメラとは.
 深度センサー Xtion2を使ってみよう | パソコン工房 Nexmag from www.pc-koubou.jp
深度センサー Xtion2を使ってみよう | パソコン工房 Nexmag from www.pc-koubou.jp
カメラが接続されていれば、realsense viewerのウィンドウ左側にカメラの状態が表示されます。 「stereo module」をonにすると、深度情報を映像として出力します。 カメラの近くにあるものは青色、遠くにあるものは赤色で表現されています。 「rgb camera」をonにすると、通常のカメラ映像を確認できます。 「stereo module」と同時に確認することもできます。 画面右. • color(rgb 画像) • depth(深度) • player(人物) • skelton(骨格) • face(顔の向きやパーツの位置) 3.2.1 color(rgb 画像) colorは,1280x960もしくは640x480の解像度で取得す ることができる. 3.2.2 depth(深度) depth はkinect が取得することができる情報の中でも 次の画像は、深度と rgb カメラの視野、またはセンサーで 見える 角度を示しています。 この図は、4:3 モードの rgb カメラを示しています。 この画像は、距離 2,000 mm における正面から見たカメラの視野を示しています。
深度センサー Xtion2を使ってみよう | パソコン工房 Nexmag
深度推定とは 深度推定とは、入力した2d画像から物体までの距離を推定する技術です。 物体からの距離を推定したい際に深度推定が活用出来ます。 活用アイデアとしてまず思いつくのは自動運転技術において人間の目の代わりとして活用出来ます。 手元に単眼カメラがあれば、深度推定と物体. より優れたパフォーマンス。インテル® realsense デプス・カメラ d455は、深度センサーとの距離を 95 mm に延長し、深度エラーを4メートルで2% 未満に改善します。86° の深度 fov に一致するグローバル・シャッターと視野を備えた rgb センサーも搭載しています。 そこでdepthカメラ界ではおなじみのintel realsenseの2019年最新版、「intel realsense depth camera d435i」をゲットしましたので早速動かしてみました。 depthカメラとは. Rgb(赤・緑・青)の各色ごとに8ビットずつ用意されている場合には色深度は24bppとなり、人間の目には識別できないほど自然な色を表すことができるため「 フルカラー 」(full color)あるいは「 トゥルーカラー 」(true color)という。.